

The functional and structural changes that take place in the brain cortex and brain stem during acquisition of a new and old motor skill highlight the need to find a rehabilitation method based on known motor learning/relearning principles that include: massed practice; task-specific for the required daily task; variability of practice; and practice of increasing difficulty.
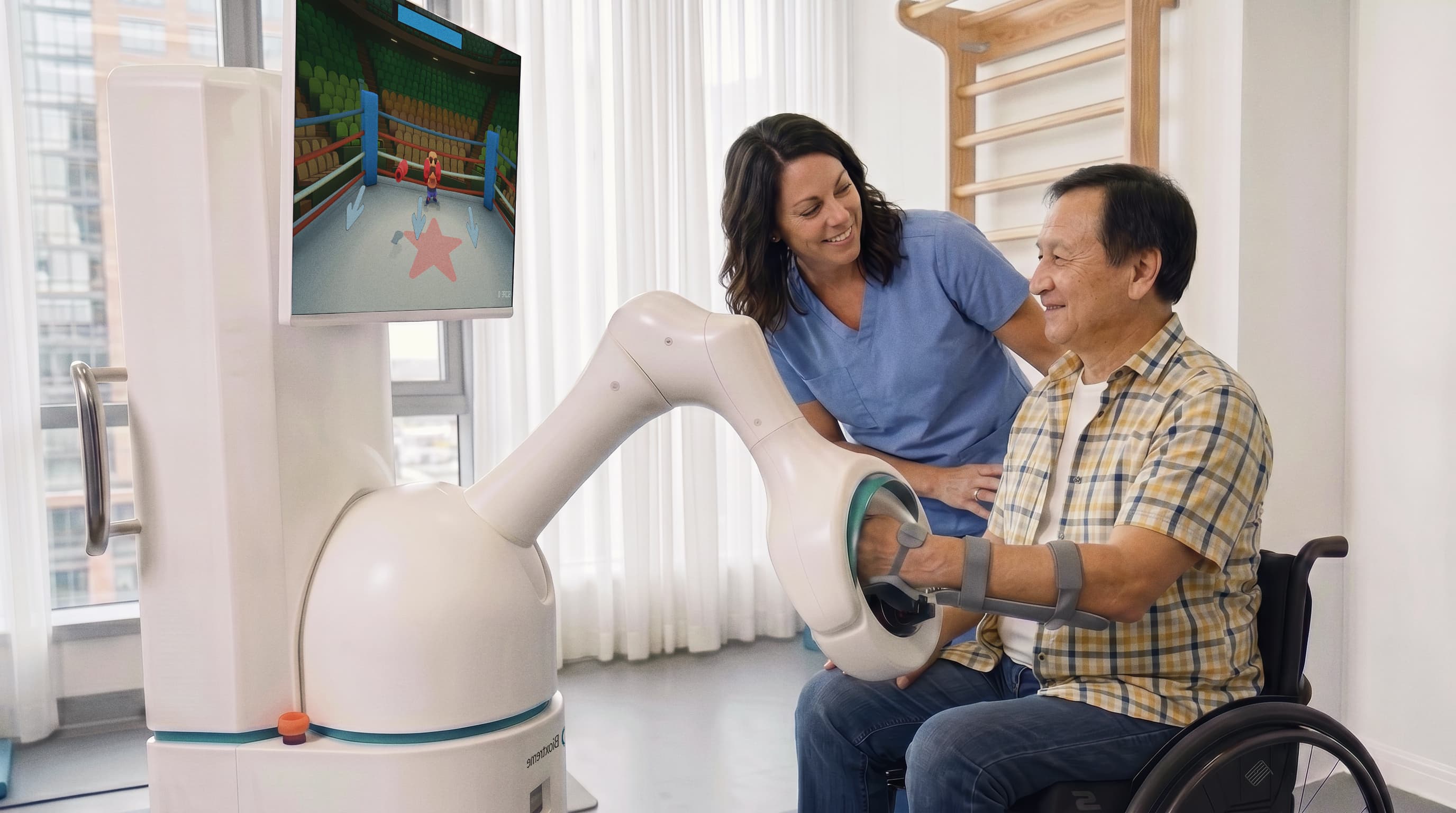
Physical rehabilitation after a stroke using interactive robotic technologies is becoming more common today. It provides automatic, repetitive training, with high volume and accuracy for objectively measuring a patient's motor performance, as well as the robotic device can delivers mechanical perturbation during training. Nevertheless, the use of virtual reality and robotic technologies, a major portion of stroke patients maintained significant long-term disability.
What is Error Augmentation?
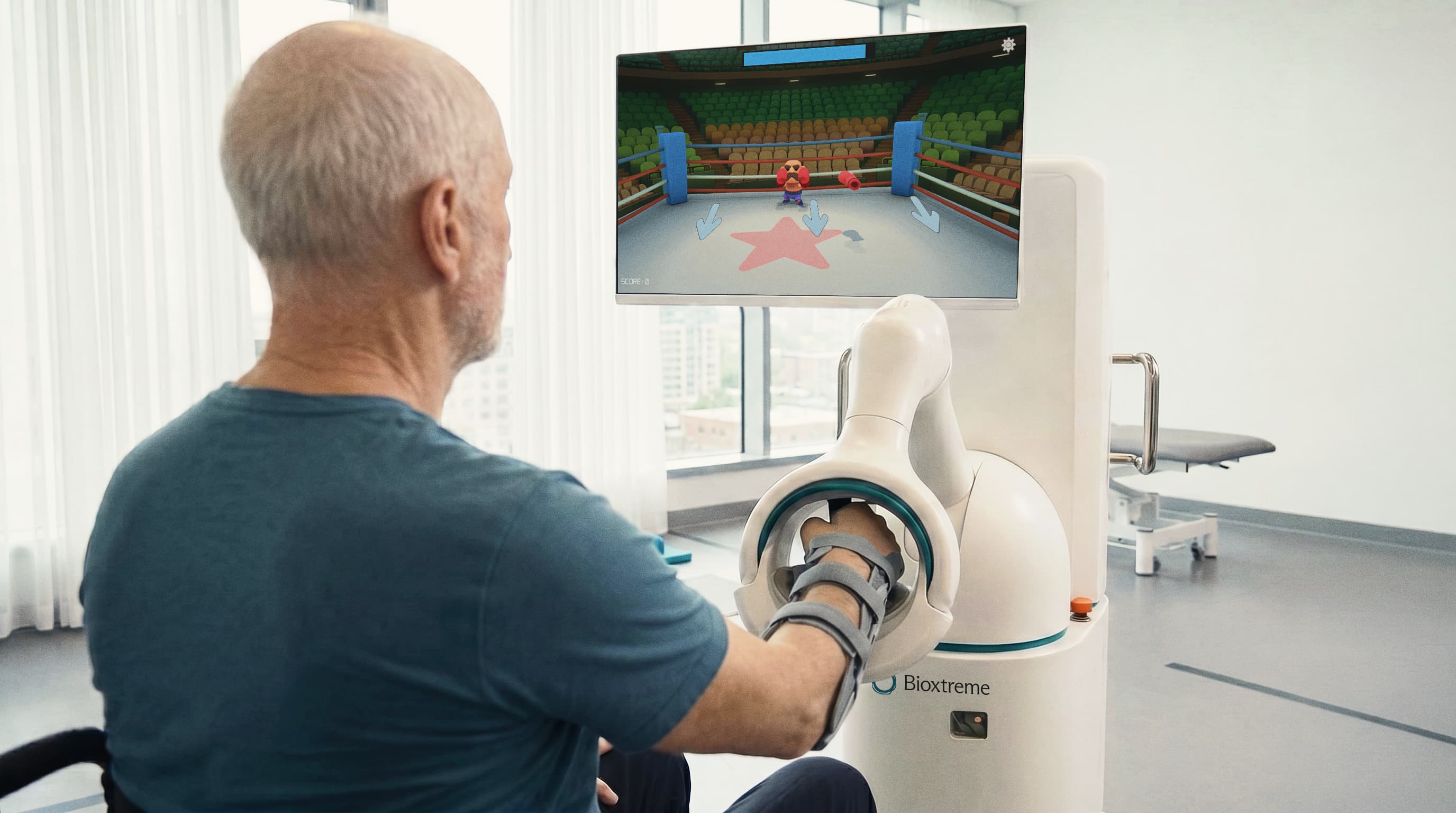
Error augmentation or error enhancement (EE) training was designated to enhance motor recovery. EE using external forces to working through internal model intending to amplify the tracking error to increase the participant's motivation to advance tracking accuracy. The robot-EE utilizes an integrated system combining robotic forces and tracking of upper limb allowing the patient to perform targeted and discrete arm reaching movements during specific games.
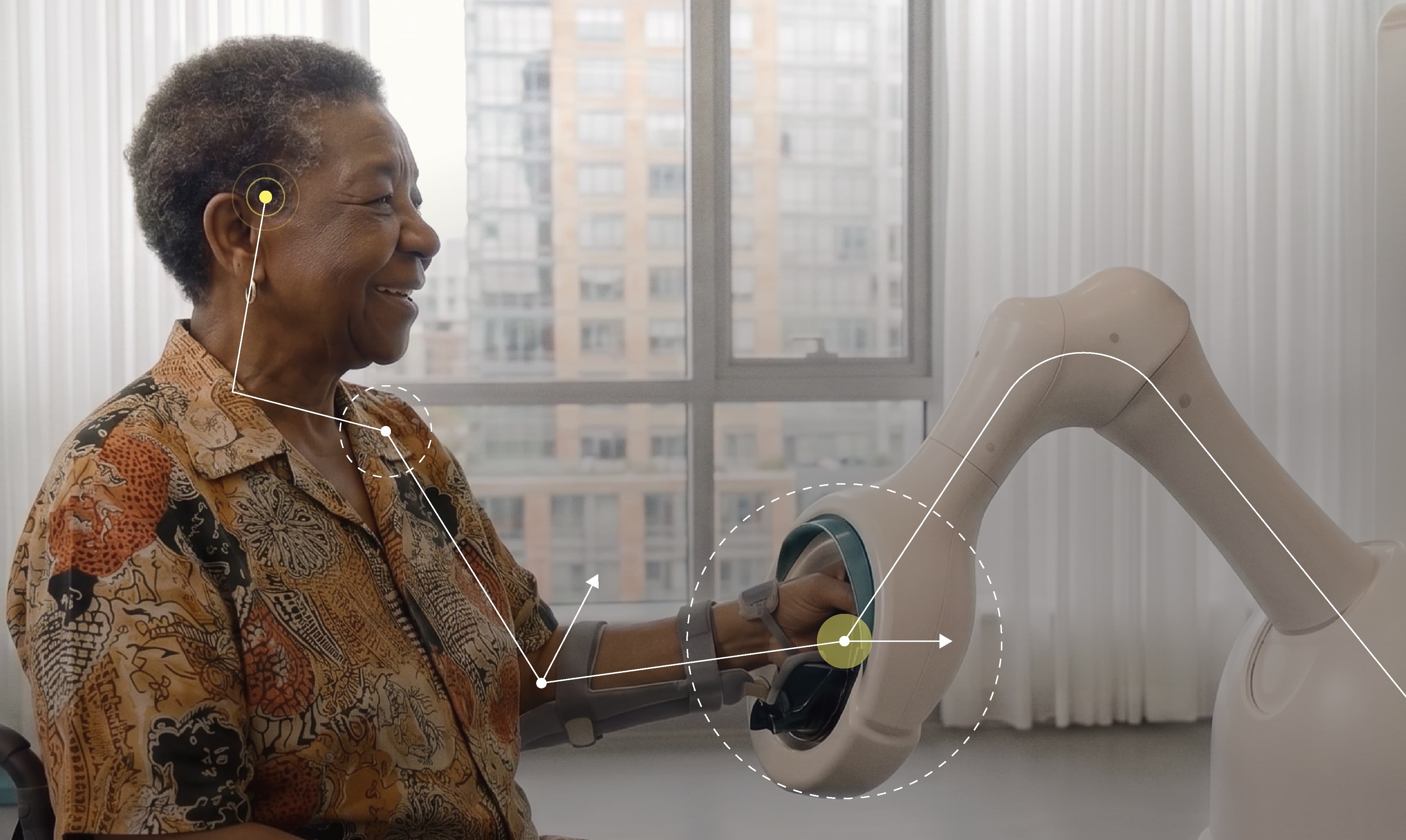
EE means that when the patient move his hand to the left, the robot moves his hand further to the left. The "error" that was enhanced was the patient's deviation from the "ideal point-to-point reaching trajectory" — i.e., ideal trajectory was assumed to be a straight line from point A to point B.
How Error Augmentation Works
EE can be explained as follows: unexpected external perturbation forces acting upon the upper limb during a reaching movement will cause the upper limb to deflect from the reaching pathway and these results in errors. If we allow for repetitive reaching performance with the same systematic perturbation forces, then we notice a decrease in errors. The motor learning component responsible for this error reduction is an internal model update — in other words, the preplanned motor program is continuously updated during the reaching movements.
Clinical Implications
Our recent EE study results (submitted for publication) highlight the positive effect of EE to improve motor recovery over standard robotic training. Nevertheless, the underlying mechanism related to these effects is not clear.
Learning models suggest that the extent of movement correction depends on the magnitude of the error experienced in the previous movement. A current notion suggests that the sensitivity to an error experienced in the previous movement increases as the magnitude of error decreases. In other words, small movement errors are more reliable to be used for correcting the ongoing motor command than large errors. Correspondingly, since the error sensitivity increases with small errors, it would be expected to observe rapid adaptation with small but not large errors. Additionally non-neural mechanisms, such as motivation and maximal exertion during training, might also contribute to positive clinical effects of EE training.
.jpg)

.jpg)
